Comparison and modifications of Path Planning Algorithms
Undergrad final year undertaking
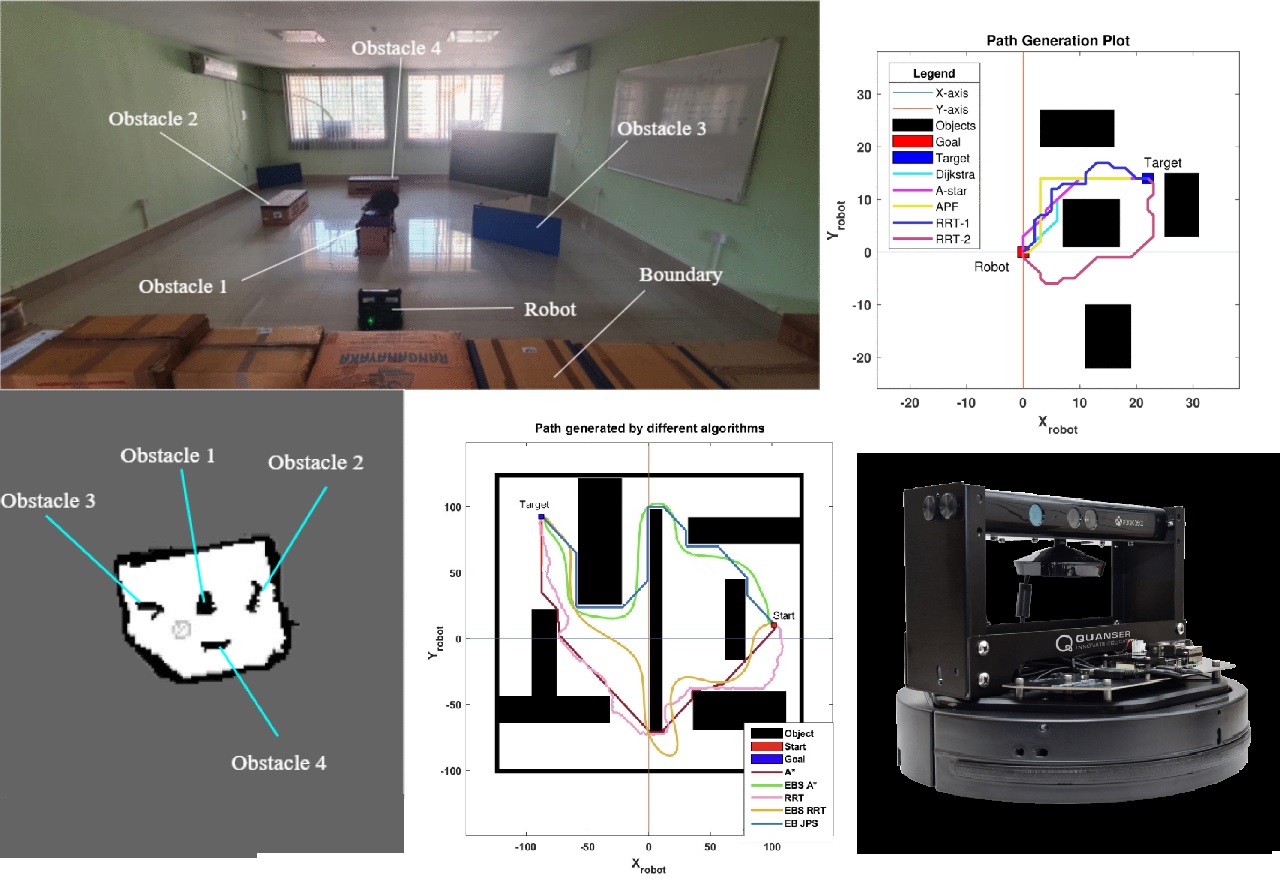
Designed a custom testing environment with obstacles and employed a 2-wheel differential drive Qbot, programming its functionalities using
Publications
-
Implementation of Classical Path Planning Algorithms for Mobile Robot Navigation: A Comparison
A. R. Warrier, P. Nedunghat, M. K. Bera and K. Nath, "Implementation of Classical Path Planning Algorithms for Mobile Robot Navigation: A Comprehensive Comparison," 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 2022, pp. 1-6, doi: 10.1109/ICECCME55909.2022.9988092.
-
Multi-Feature Enhancement of Standard and Modified A-star and RRT Algorithms
A. R. Warrier, P. Nedunghat, M. K. Bera and K. Nath, "Multi-Feature Enhancement of Standard and Modified A-star and RRT Algorithms," (Accepted)(Not yet viewable)