Sensor Analysis and SLAM for Robotic Systems
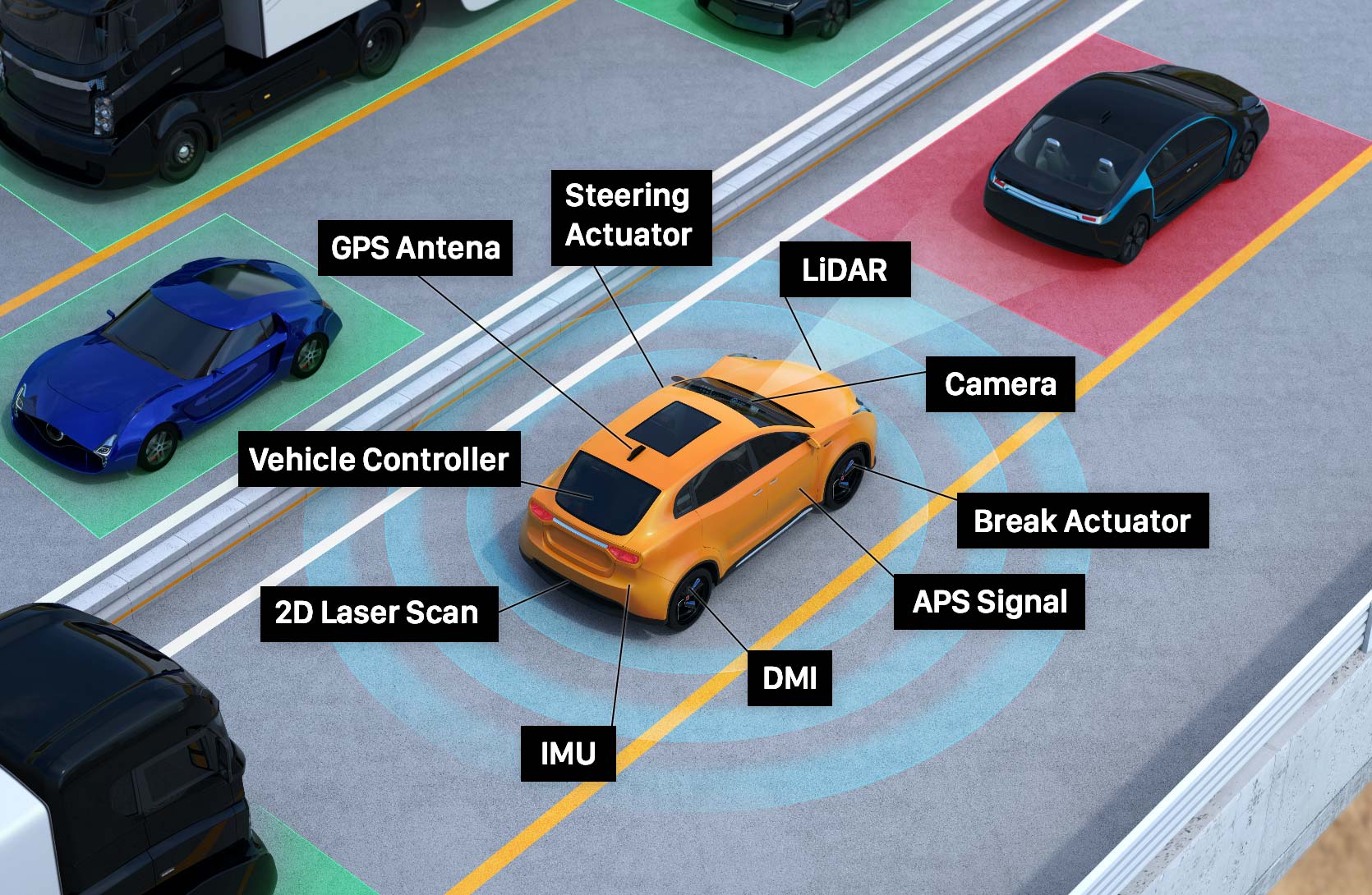
Worked on sensors for error analysis and on a project for SLAM comparison.
This portfolio lists my skills and some projects that I've completed some I am currently invloved in.
I'm Arjun Rajeev Warrier, a mechatronics enthusiast currently pursuing a Master's in Robotics at Northeastern University. I hold a Bachelor's degree in Electronics & Instrumentation Engineering from the National Institute of Technology Silchar. I have also authored two research papers, of which one is published and the other has been accepted into another conference. Beyond my studies, I'm passionate about motion planning, computer vision, control systems, and sensors. When I'm not hunched over a computer, I enjoy outdoor naps, running, and meeting new people. I've also picked up a guitar. Let's connect and explore the world of technology and creativity together!

Worked on sensors for error analysis and on a project for SLAM comparison.
Developed deep learning solutions for self-driving cars, including road segmentation, object detection, multi-task learning, and bird's-eye view visualization.
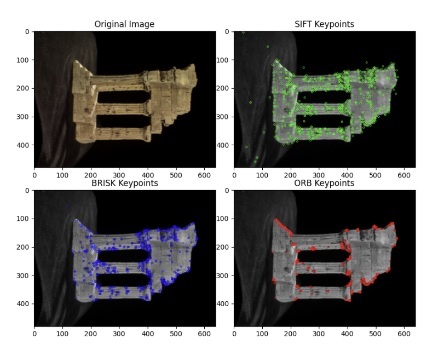
Worked on a structure from motion pipeline with python and wrote code for image stitching in Matlab.
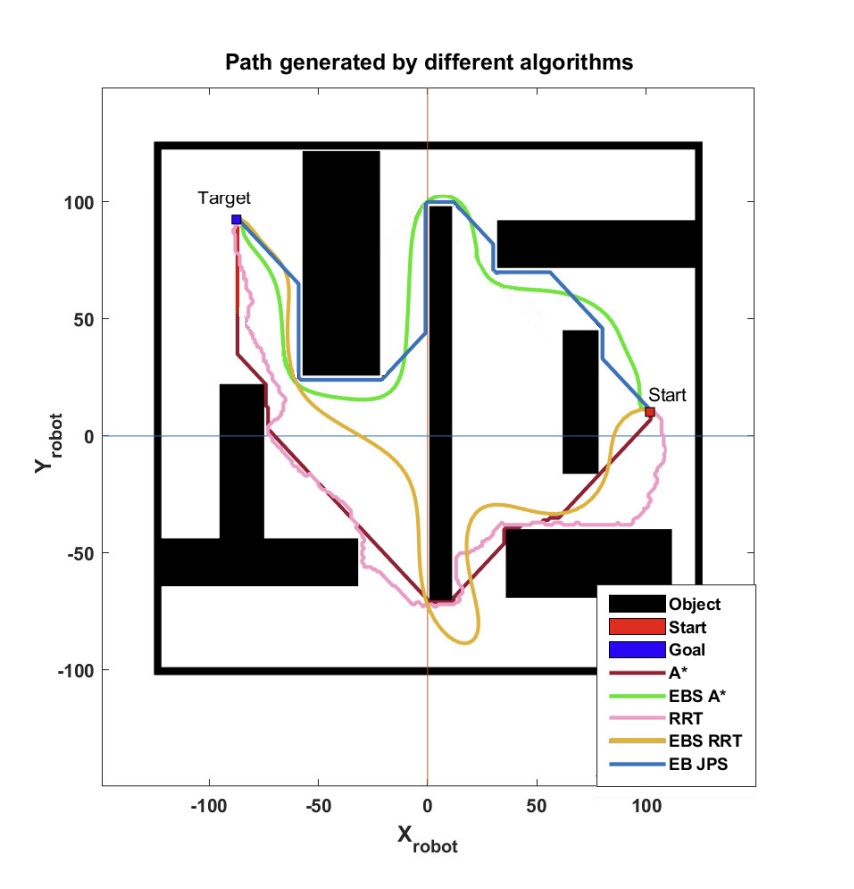
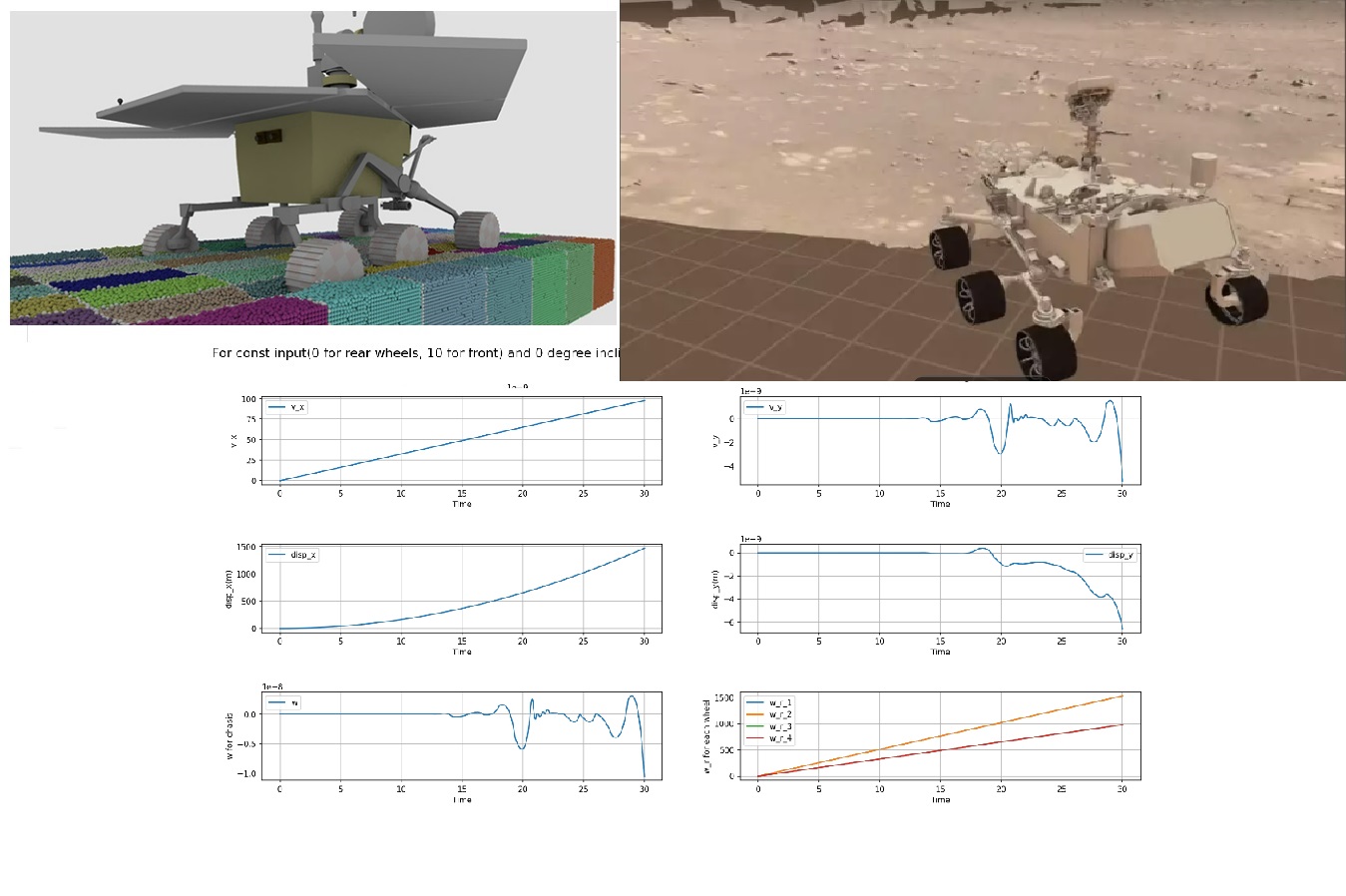
Testing, implementation and development of modifications for path planning algorithms.
My more prominent projects and designs during my time at SharkNinja
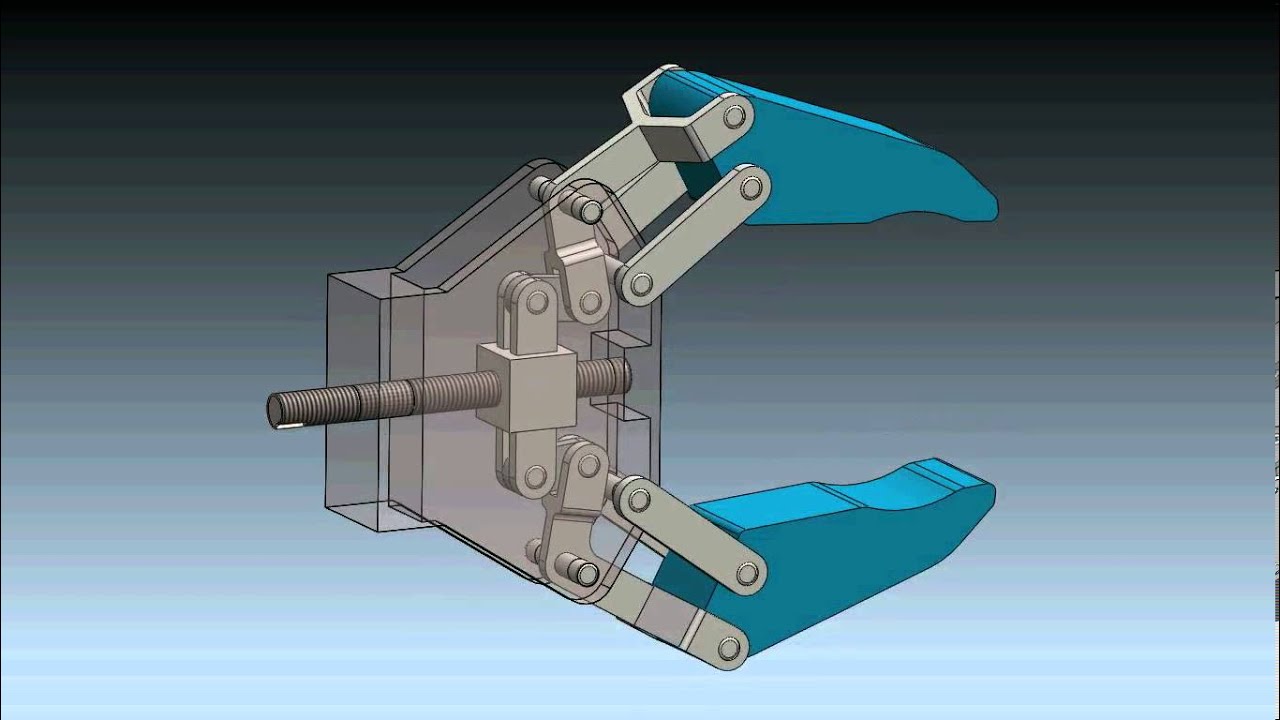
Development of novel training procedure, with emphasis on safety, generalisation and response time improvement. Modelling of manipulator with SolidWorks. To be trained to Pick'n'Place with video input feeds.